Hamilton 公司采用 SIKO 磁性检测技术用于其 Liquid-Handling-System液体处理系统


借助实验室自动化技术,可以显著减少分析工作所需的时间和出错的敏感性。在客户对实验室分析工作的成本压力背景下,这是两个非常重要的因素。在液体样品的全自动处理过程中,液体处理系统的使用很有帮助。
Hamilton Company 公司是生物技术、制药行业和化学工业所需的实验室自动化解决方案供应商中的知名企业。在液体处理工艺方面,这家来自瑞士 Bonaduz 的公司提供了一种用于快速测试和可重复筛选各种物质的新系统。 “Hamilton VANTAGE 液体处理系统”移液机器人系统,能够通过单液管、96 或 384 个移液头,从一个微量滴定板精确地采集体积为 500 纳升至 1 毫升的样品,并将它们输送到另一个微量滴定板。由于传输的单个样品体积非常小,但同时传输的样品数量可能很大,因此对样品传输的准确性提出了很高的要求。通过精确的取样和分配工作,可确保各个移液步骤之间的可重复性精度,并最终积极影响整个工作任务的成功。


参数可自由设置的移液机器人
Hamilton 的 VANTAGE 液体处理系统适用于各种实验室应用,如 DNA 分析、PCR 制备和纯化、分子生物学样品制备、血液分析等,所服务客户包括制药公司以及学术研究所和诊室等。 Hamilton Bonaduz AG 公司的电子技术项目主管 Martin Rupp 说:“我们提供的新 VANTAGE 液体处理系统,作为可以自由设置的模块化系统。”该系统可用作为 2 米或 1.3 米的移液机器人,也可以扩展到包括实验室器具、运输系统、物流舱、培养箱、样品容器和分析所需的其他单元。各个模块的垂直排列实现了这种灵活的配置,因此也可以简便集成其他制造商的设备。
运输机器人可以在系统内移动样品容器或将它们交给第三方设备,系统所基于的 SiLA 软件标准确保了第三方设备的简单实施,测定过程由Hamilton 软件“INSTINCT V”进行控制。使用该软件,多个用户可以同时在系统上工作,并且可以使用同一设备进行各种实验操作。使用 Drag-and-Drop 拖放操作功能,可以轻松设置仪器功能和实验方式方案,借助样液转移过程的 3D 模拟显示功能,确保了较短的设置时间。 示例,10 微升移液器吸头可容纳体积为 1 微升的容量和准确度却达 5.0%,其体积容量可以精确定位在 2.25 毫米网格(1536 孔板)中的所有液管中。为此,两种类型的 SIKO 测量技术被应用,两个磁尺用于从下方和侧面监控移液机器人上的电机控制,由磁尺和电路板组成的解决方案确保了轴向运动的精确执行。

独特设置调整的磁尺解决方案:无需进行基准运行
移液系统配备了用于线性检测定位各个转轴的电机,移液机器人在所有三个空间维度的三根轴上移动:纵向方向的 x 轴,移液臂和液管沿该轴移动,移液液管的前后移动是通过 y 轴实现的,高度的变化是通过 z 轴实现的。相应电机控制这三根轴的运动,磁性传感器向控制器提供位置反馈信息以监控电机运动。 y 轴上的检测器通过使用SIKO 磁带作为检测器的组成部分,因为 Hamilton 公司自己为此开发了传感器。 “SIKO 对我们的特殊要求反应非常灵活,因为两根轴已经配备了我们自己的磁传感器,SIKO 公司为此提供了带有特殊编码的相应磁带”,Martin Rupp 先生确认道。该磁带解决方案聚焦于移液臂上,集成式直线电机需要相应位置信息才能执行所需运动,一方面,磁带系统承担确定移液臂精确位置的功能,另一方面,还确保移液管在该轴上的准确位置。
液管必须非常迁细,以便它们可以在移液臂的狭小空间条件下工作,且不会发生碰撞。为了满足这一要求,Hamilton 公司将液管设置在移液臂的两侧,为此,也需要两根磁带,分别装在移液臂的左右两侧。这种布置结构的移液管最大宽度为 18 毫米,“市场上没有一种磁性测量系统可以在 18 毫米的宽度上工作,并且可以对大约 700 毫米的长度进行绝对编码”,Martin Rupp 先生说道。虽然最初的磁带解决方案在技术上是可行的,但供货可靠性不足, “对我们来说同样重要的是,我们总是能按时得到所需物件,并且质量能够保证;所以我们选择了 SIKO”,工程项目经理确认道。


位置移动检测系统:只需使用电路板和磁带
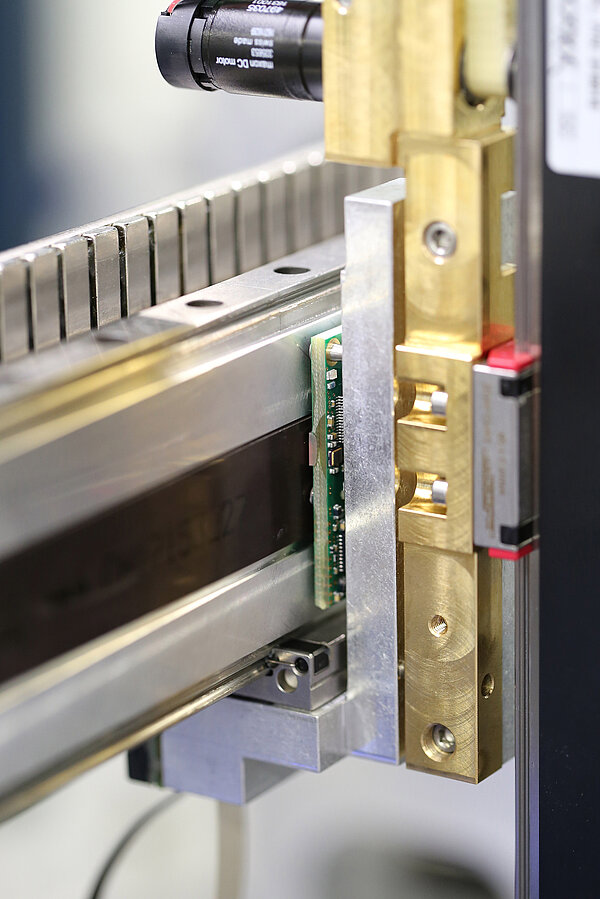
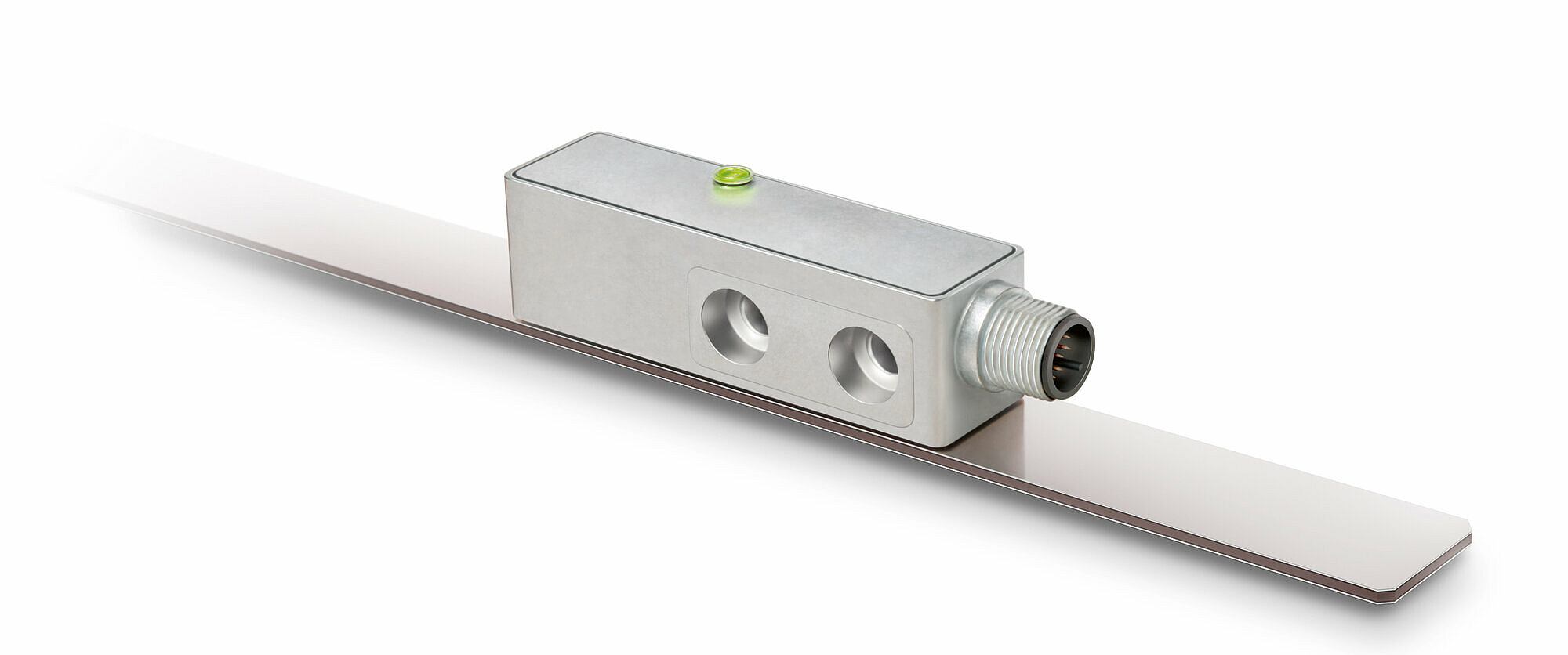
Hamilton 公司使用 SIKO 公司的完整解决方案来检测转轴的纵向位置:使用传感器及相应磁带。在此,必须考虑到非常狭窄的可利用空间的前提条件,原计划使用规格为 82.6 x 20 毫米大小的传感器,但由于尺寸太大原因无法安装,因此,Hamilton 公司和 SIKO 公司共同选择了电路板解决方案,即将带有传感器元件的传感器电路板直接内置于机器人外壳中。纯电路板解决方案在通常情况下不是很容易实现,尤其是在出现污垢或传感器可能与水接触的情况下,移液机器人的现有外壳提供了内部元件免受外部影响的保护作用,使电路板解决方案成为可能。借助其精简性传感器的类型变体还起到一个积极的副作用:Hamilton 公司的制造成本达到降低。
在其检测类型变体中,传感器将移液臂的运动作为路径检测系统,“只有通过相应的移液臂的定位,才能准确定位液管位置”,Martin Rupp 先生描述道, “液管位于移液臂上,因此当它移动时,它必须至少与液管的轴一样精确,因此,移液臂必须非常精确地定位在 x 轴上。”在使用 SIKO 产品之前,所使用的其竞争对手的产品会限制移液管在 y 轴上的工作范围。Hamilton 公司认为,使液管也可以到达位于系统边缘的微量滴定板,是非常重要的一个因素。原先使用的传感器解决方案,无法充分利用液管的工作范围,因此,需要寻找一种产品,其需要更小深度空间,却为液管提供更大工作空间。为此特性,SIKO 公司建议采用 MSA501 磁性传感器。 “凭借 SIKO 公司的大量专业知识和相应较低的开发成本,我们能够采用一种传感器,达到利用最大可能的工作范围,其通过原先使用的方法是无法实现的”,Martin Rupp 先生总结说。

通过使用SIKO 磁性传感器达到提供高度系统精度
无论是基于电路板提供的完整解决方案,还是通过由客户自己的传感器和 SIKO 磁带组合成的类型变体,都表明,客户特定要求的设计调整,对于提供精确运行的测量系统来说是决定性的。 “系统的运行功能也由磁带和传感器等因素决定”,工程项目经理说,“如果其运行故障,移液管将无法工作,整个移液机器人也将无法工作。”在其应用中,测量系统的精确性对于整个设备的质量保证尤其重要。调配的 SIKO 绝对式传感器的分辨率高达 10 μm 和 增量式达 2.5 μm,重复性精度为 5 μm,通过其非接触式运行功能,传感器达到无磨损且只需要很少的维护。 Hamilton 公司的液体处理系统需要 20 μm 的初始系统精度,其要求是竞争对手的产品无法达到的。
在Hamilton 公司选择 SIKO 测量系统过程中,两种检测系统合二为一起到重要影响:绝对式和增量式测量系统。绝对式通过绝对编码的磁极代表,传感器扫描磁极,并与增量式部分一起统计,以这种方式,达到输出组合的绝对-增量式数据。 “对于竞争对手,提高系统精度只能通过绝对式接口来实现。然而,我们所使用的电子设备是基于增量式接口的,”Martin Rupp 先生解释道。自 2014 年 9 月以来,带有 SIKO 传感器的 Hamilton 系统已成功投入市场。 “对我们来说,这是一次令人信服的合作,未来只存在采用 SIKO 磁性测量技术的 Hamilton VANTAGE 液体处理系统,”Martin Rupp 先生说到。
作者:自由编辑,Carolin Ordosch 女士
含空格字符总数量: 11566

发布日期
我们的专家解答您的问题
