Sistema de manipulación de líquidos de Hamilton con tecnología de medición magnética de Siko


Con la ayuda de la automatización de los laboratorios, el tiempo necesario para los análisis y la susceptibilidad a los errores pueden reducirse considerablemente. Se trata de dos aspectos importantes en un contexto de presión de costes por parte de los clientes de los análisis de laboratorio. En el tratamiento totalmente automatizado de muestras líquidas, por ejemplo, esto habla en favor del uso de sistemas de manipulación de líquidos.
Entre los proveedores de soluciones de automatización de laboratorio para aplicaciones en las industrias biotecnológica, farmacéutica y química, Hamilton es una de las empresas más consolidadas. En el campo de la manipulación de líquidos, la empresa de Bonaduz (Suiza) ofrece un nuevo sistema para el análisis rápido y el screening reproducible de diversas sustancias. El sistema robótico de pipeteado "Hamilton VANTAGE Liquid Handling System" es capaz de recoger muestras con un volumen de 500 nanolitros hasta un mililitro de forma precisa con canales individuales, 96 o 384 cabezales de pipeteado múltiples de una placa de microtitulación y entregarlas a otra. Dado que los volúmenes individuales transferidos en este proceso pueden ser muy pequeños y el número de muestras transportadas al mismo tiempo puede ser elevado, se plantean grandes exigencias a la transferencia de muestras en términos de precisión. Un muestreo y una dispensación precisos garantizan la repetibilidad entre los distintos pasos de pipeteado y, en última instancia, influyen en el éxito de toda la tarea de trabajo.


UmPara determinar con precisión la posición de los cabezales de pipeteado a lo largo de las tres dimensiones espaciales, Hamilton ha utilizado la tecnología de medición magnética de SIKO GmbH en el nuevo robot de pipeteado. La empresa de la Selva Negra fabrica una amplia gama de tecnologías de medición de longitudes, ángulos y velocidades que satisfacen con precisión los requisitos de la tecnología analítica. Para su uso en el sistema de manipulación de líquidos Hamilton VANTAGE, SIKO ha adaptado individualmente a los requisitos las cintas magnéticas y la placa de sensores utilizados.
Robots de pipeteo configurables individualmente
Dado que los volúmenes individuales transferidos en este proceso pueden ser muy pequeños y el número de muestras transportadas al mismo tiempo puede ser elevado, se plantean grandes exigencias a la transferencia de muestras en términos de precisión. Un muestreo y una dispensación precisos garantizan la repetibilidad entre los distintos pasos de pipeteado y, en última instancia, influyen en el éxito de toda la tarea de trabajo. Para determinar con precisión la posición de los cabezales de pipeteado a lo largo de las tres dimensiones espaciales, Hamilton ha utilizado la tecnología de medición magnética de SIKO GmbH en el nuevo robot de pipeteado. La empresa de la Selva Negra fabrica una amplia gama de tecnologías de medición de longitudes, ángulos y velocidades que satisfacen con precisión los requisitos de la tecnología analítica. Para su uso en el sistema de manipulación de líquidos Hamilton VANTAGE, SIKO ha adaptado individualmente a los requisitos las cintas magnéticas y la placa de sensores utilizados.
La sencilla implementación de los dispositivos de terceros está garantizada, por un lado, por un robot de transporte, que puede mover los recipientes de muestras dentro del sistema o transferirlos a los dispositivos de terceros y, por otro, por el estándar de software SiLA en el que se basa el sistema. Los ensayos se controlan mediante el software "INSTINCT V" de Hamilton. Con el software, varios usuarios pueden trabajar en el sistema al mismo tiempo y se pueden llevar a cabo diferentes experimentos con los mismos instrumentos. La configuración de los instrumentos y los diseños de los experimentos pueden crearse y modificarse simplemente arrastrando y soltando. Una simulación en 3D de la transferencia de muestras garantiza un breve tiempo de preparación. Por ejemplo, una punta de pipeteado de 10 microlitros mantiene un volumen de 1 microlitro con una precisión del 5,0%. Estos volúmenes pueden posicionarse con precisión en una cuadrícula de 2,25 milímetros (placa de 1536 pocillos) en todos los canales. Para esta tarea se utilizan dos versiones de la tecnología de medición de SIKO. Se utilizan dos cintas magnéticas para controlar el control del motor del robot de pipeteado hacia abajo y hacia los lados. Una solución compuesta por una cinta magnética y una placa de circuitos garantiza la ejecución precisa del movimiento en el eje longitudinal.

Solución de cinta magnética adaptada individualmente: sin necesidad de recorridos de referencia.
El sistema de pipeteado está equipado con motores lineales para posicionar los ejes individuales. Hay tres ejes sobre los que se mueve el robot de pipeteado en las tres dimensiones espaciales: el eje x en dirección longitudinal, en el que se desplaza el brazo de pipeteado y, por tanto, los canales. El movimiento hacia delante y hacia atrás de los canales de pipeteado se realiza a través del eje y, y el cambio de altura se consigue a través del eje z. Los motores controlan estos tres ejes, con sensores magnéticos que proporcionan información de posición a la unidad de control para supervisar el motor. Para los sensores del eje y, SIKO utiliza las cintas magnéticas, ya que Hamilton desarrolló los sensores para ello por sí mismo. "SIKO reaccionó de forma muy flexible a nuestros deseos, porque dos ejes ya estaban equipados con sensores magnéticos propios. SIKO suministró las cintas magnéticas correspondientes con una codificación especial para este fin", confirma Martin Rupp. Esta solución de cinta magnética se encuentra en el brazo de pipeteado. El motor lineal integrado necesita información sobre la posición para poder ejecutar el movimiento. Por un lado, el sistema de cinta magnética asume la función de determinar la posición del brazo de pipeteado y, por otro lado, también se encarga de que los canales de pipeteado se coloquen exactamente en este eje.
Los canales deben ser estrechos para poder trabajar sin colisiones en las condiciones de espacio reducido del brazo de pipeteado. Para cumplir este requisito, Hamilton dispuso los canales a ambos lados del brazo de pipeteado. Por este motivo, también fueron necesarias dos cintas magnéticas, una a la derecha y otra a la izquierda del brazo de pipeteado. Además, los canales de pipeteado para esta disposición podían tener una anchura máxima de 18 milímetros. "No existe en el mercado ningún sistema de medición magnética que funcione con una anchura de 18 milímetros y que pueda codificar absolutamente una longitud de unos 700 milímetros", afirma Martin Rupp. La solución original de cinta magnética era técnicamente funcional, pero la fiabilidad del suministro era insuficiente. "Para nosotros también es importante recibir siempre la mercancía a tiempo y que la calidad sea la adecuada; por eso nos decidimos por SIKO", confirma el jefe de proyecto.
Una ventaja importante es que la tecnología absoluta utilizada es muy fiable y el valor de posición está disponible incluso después de una interrupción del suministro eléctrico sin necesidad de un recorrido de referencia adicional. Básicamente, la codificación absoluta de las cintas magnéticas elimina las carreras de inicialización habituales en otros sistemas cuando se conectan. El accionamiento está listo para funcionar de inmediato sin necesidad de una marcha de referencia o una conmutación del motor que requieren mucho tiempo.


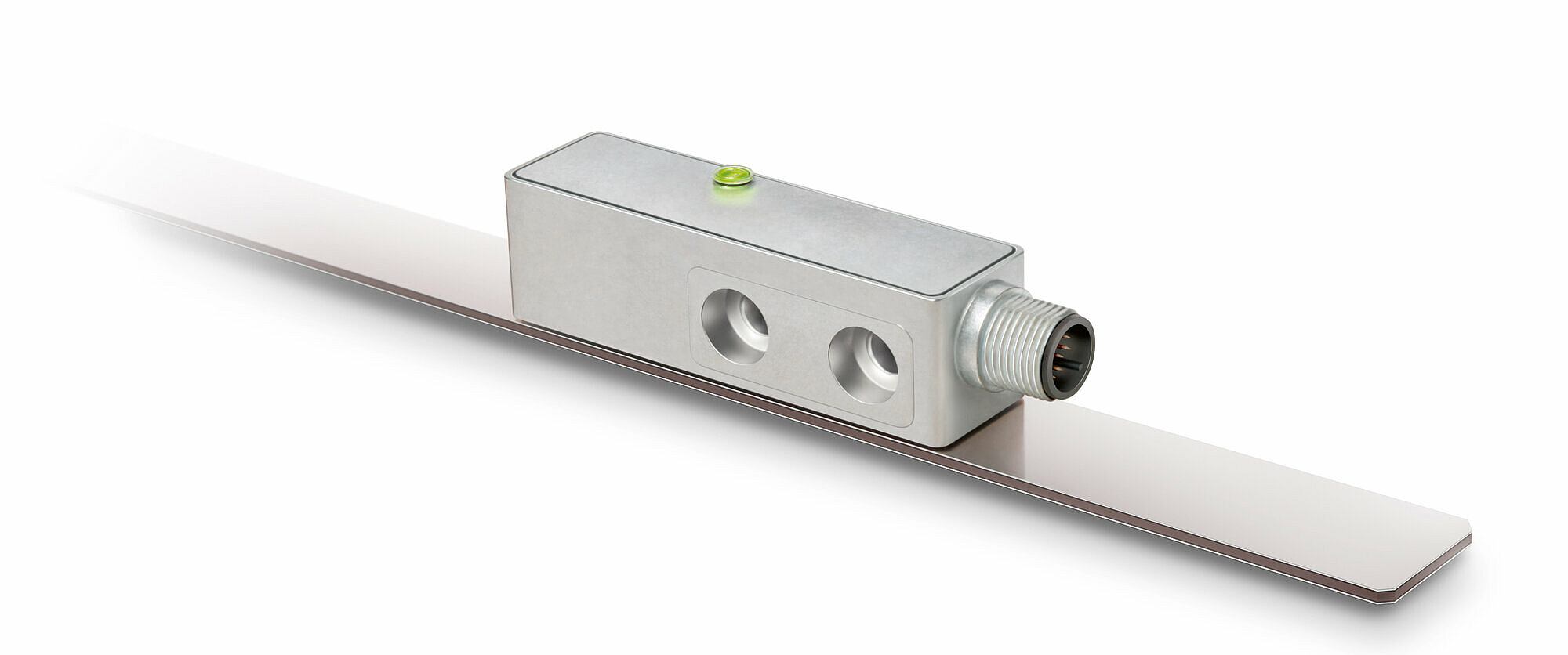
Sistema de medición de posición: sólo placa de circuito impreso y cinta magnética
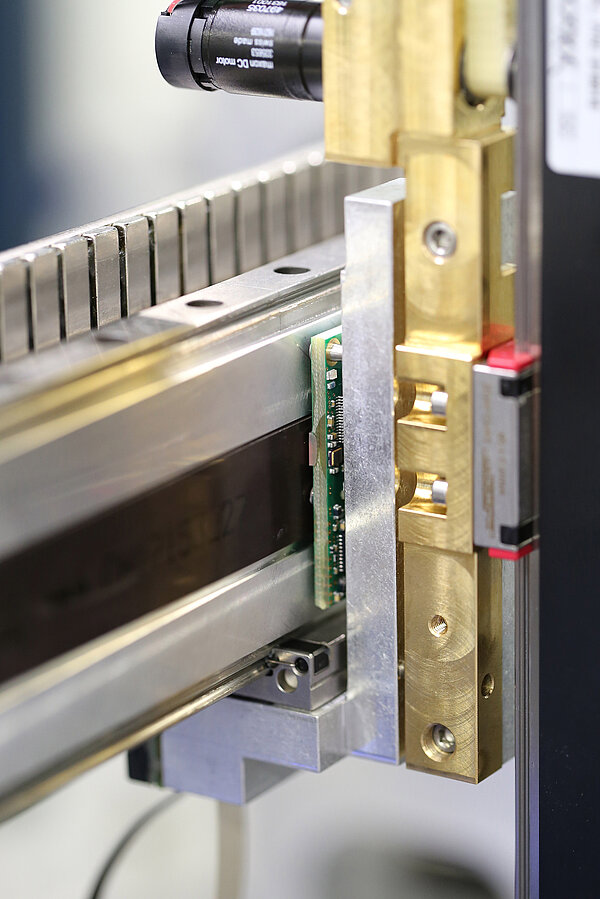
Para la medición de la posición en el eje longitudinal, Hamilton utiliza una solución completa de SIKO: un sensor con su correspondiente cinta magnética. También en este caso hubo que tener en cuenta las condiciones de espacio muy reducidas. Inicialmente se pensó en un sensor de 82,6 por 20 milímetros, pero su tamaño no permitía instalarlo. Por ello, Hamilton y SIKO optaron por una solución de placa de circuito impreso, es decir, sólo se instaló directamente en la carcasa la placa de circuito impreso del sensor con los elementos del sensor. Una solución de placa de circuito impreso pura no es fácilmente posible en otras circunstancias, especialmente si se produce ensuciamiento o el sensor puede entrar en contacto con el agua. La carcasa existente del robot de pipeteo ofrecía protección contra influencias externas e hizo posible la solución de la placa de circuito impreso. Efecto secundario positivo de esta variante de sensor estilizado: una reducción de costes para Hamilton.
En esta variante, el sensor detecta el movimiento del brazo como un sistema de medición de recorrido. "La colocación exacta de los canales sólo es posible posicionando adecuadamente el brazo de pipeteado", describe Martin Rupp. "Los canales se apoyan en el brazo, por lo que cuando éste se mueve, tiene que ser al menos tan preciso como el eje del canal. Así que el brazo tiene que posicionarse con mucha precisión en el eje x". Antes de utilizar SIKO, se utilizaba un producto de la competencia que provocaba limitaciones en el rango de trabajo de los canales de pipeteado, es decir, en el eje y. Para Hamilton es muy importante que los canales también puedan alcanzar las placas de microtitulación situadas en el borde del sistema. Con la solución de sensor utilizada anteriormente, no se podía aprovechar al máximo el campo de trabajo de los canales. Por lo tanto, se necesitaba un producto que requiriese menos espacio en profundidad y proporcionase a los canales un amplio espacio de trabajo. SIKO adaptó para ello el sensor magnético MSA501. "Gracias al know-how de SIKO y a los bajos costes de desarrollo, pudimos utilizar un sensor que maximizaba el área de trabajo de una forma que no era posible con la variante anterior", afirma Martin Rupp.

Elevada precisión del sistema con sensores magnéticos de SIKO
Tanto la solución completa basada en la placa de circuito impreso como la variante compuesta por el sensor propio del cliente y las cintas magnéticas de SIKO demuestran que las adaptaciones a medida pueden ser decisivas para un sistema de medición que funcione con precisión. "La funcionalidad del sistema viene determinada, entre otras cosas, por las cintas magnéticas y los sensores", afirma el director del proyecto, "sin éstos, los canales de pipeteado y, por tanto, todo el robot de pipeteado no funcionan." En esta aplicación, la precisión del sistema de medición es especialmente decisiva para la calidad del sistema. El sensor SIKO adaptado tiene una resolución máxima de 10 μm absolutos y 2,5 μm incrementales. La precisión de repetición es de 5 μm. Gracias a su modo de funcionamiento sin contacto, los sensores no sufren desgaste y requieren poco mantenimiento. En el sistema de manipulación de líquidos de Hamilton, se requería una precisión inicial del sistema de 20 μm, que el producto de la competencia no podía alcanzar.
Para Hamilton, lo importante a la hora de elegir el sistema de medición SIKO fue que haya dos sistemas en uno: uno de medición absoluta y otro incremental. El absoluto consta de polos magnéticos codificados absolutos que se escanean mediante un sensor y se calculan junto con la unidad incremental. De este modo, se obtienen datos combinados absolutos-incrementales. "Con la competencia, se daba el caso de que una mayor precisión del sistema sólo podía conseguirse a través de la interfaz absoluta. Sin embargo, la electrónica utilizada se posiciona con la interfaz incremental", explica Martin Rupp. Los sistemas Hamilton con tecnología de sensores SIKO están en el mercado desde septiembre de 2014. "Desde nuestro punto de vista, una cooperación convincente. En el futuro solo habrá sistemas de manipulación de líquidos Hamilton VANTAGE con tecnología de sensores magnéticos SIKO", afirma Martin Rupp.
Autora: redactora libre, doña Carolin Ordosch

Publicado el
Nuestro/a experto/a para sus preguntas
